隨著5G網絡的全球部署,其影響力已遠超“速度快”的單一維度,正深刻重塑眾多產業,其中智能網聯汽車(Connected and Autonomous Vehicles, CAVs)被視為最具變革潛力的領域之一。理解5G賦能下智能網聯汽車的發展趨勢與關鍵技術,對于把握未來交通出行乃至城市形態的演進至關重要。
一、超越速度:5G為智能網聯汽車帶來的核心賦能趨勢
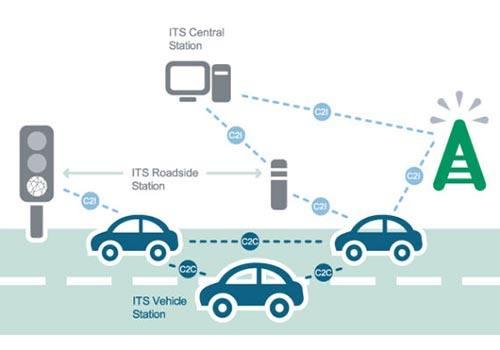
- 超可靠低時延通信(URLLC):這是5G區別于前代網絡的革命性特性。毫秒級(理論可達1ms)的極低時延,使得車輛與車輛(V2V)、車輛與基礎設施(V2I)、車輛與萬物(V2X)之間的實時信息交換成為可能。這直接關乎行車安全,例如,前車緊急剎車的信號可瞬間同步至后方數公里內的車輛,實現協同避撞,遠超人類反應與單車傳感器的感知極限。
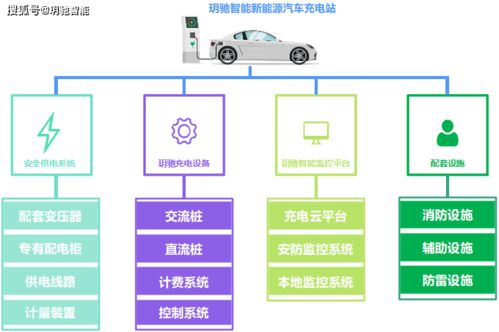
- 海量機器類通信(mMTC):5G網絡支持每平方公里百萬級別的設備連接。在智能交通系統中,這不僅意味著所有車輛,還包括道路上的傳感器、交通信號燈、行人設備、甚至井蓋等都將聯網,構成一個極其龐大和精細的實時數據網絡。汽車將從“信息孤島”轉變為龐大動態交通物聯網中的智能節點。
- 增強型移動寬帶(eMBB)與邊緣計算結合:雖然高速下載仍是基礎,但更關鍵的是與邊緣計算(MEC)的結合。高精度地圖的實時更新、車載信息娛樂系統海量內容的無縫流轉、以及傳感器(尤其是攝像頭和激光雷達)產生海量數據的實時初步處理與上傳,都依賴于此。這減輕了車載計算單元的負荷,并使“軟件定義汽車”和持續在線升級(OTA)更加高效。
- 網絡切片技術:5G允許在統一的物理網絡基礎上,虛擬出多個獨立的邏輯網絡。針對智能網聯汽車,運營商可以開辟一個專屬的、具有最高優先級和安全性保障的“切片”,專門用于傳輸自動駕駛的安全控制指令和關鍵安全信息,確保其在網絡擁塞時依然暢通無阻。
二、關鍵技術研究聚焦
在5G的使能下,智能網聯汽車相關技術研究正圍繞以下幾個核心方向深入展開:
- V2X通信技術與標準融合:研究如何將基于5G的C-V2X(蜂窩車聯網)技術與已有的DSRC(專用短程通信)等標準更好地融合與演進,實現全域、全場景的可靠通信。包括通信協議、頻譜分配、安全認證機制等。
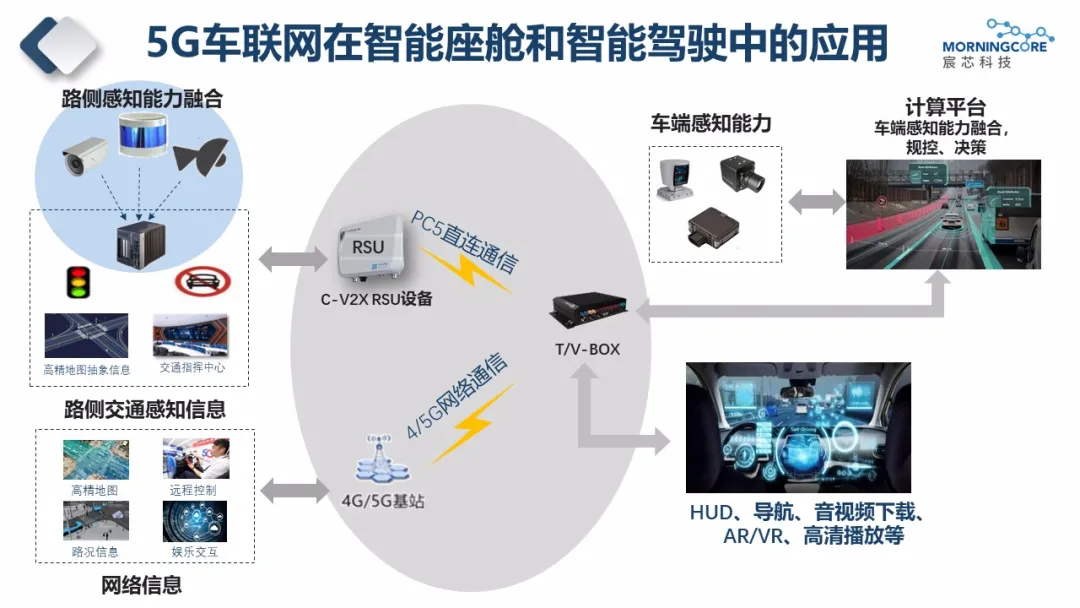
- 高精度定位與感知融合:5G網絡本身可作為高精度定位的補充手段(如5G NR定位)。研究重點在于如何將5G定位數據與車載GNSS(全球導航衛星系統)、IMU(慣性測量單元)、激光雷達、攝像頭等多源傳感器數據進行深度融合,在隧道、城市峽谷等GNSS信號弱區域實現連續、穩定、厘米級的定位,這是高級別自動駕駛的基石。
- 車路云一體化協同控制:這是智能網聯汽車的終極形態之一。研究在5G和邊緣計算支持下,如何實現“聰明的車”與“智慧的路”、“強大的云”深度融合。車輛將部分感知和決策任務上交給路側智能設施(RSU)和邊緣云,云端則進行全局交通流優化、預測性規劃,并向車輛下發協同駕駛指令,實現群體智能和全局交通效率最優。
- 網絡安全與數據隱私:連接即意味著風險敞口。研究重點包括:構建從車載通信模塊到云端服務的端到端安全防御體系;設計防篡改、防偽造的V2X消息認證機制;在實現數據共享價值的通過聯邦學習、數據脫敏等技術保護用戶位置、行車習慣等個人隱私數據。
- 仿真測試與驗證平臺:由于真實道路測試成本高、風險大、場景覆蓋有限,基于5G數字孿生技術的虛擬仿真測試平臺成為研究熱點。通過構建高保真的虛擬交通環境,模擬各種極端、罕見場景,對網聯自動駕駛算法進行海量、高效的驗證與迭代。
5G對于智能網聯汽車而言,絕非僅僅是“更快的下載速度”。它通過URLLC、mMTC、網絡切片等核心特性,正在構建一個實時、可靠、全域連接的數字底座,從而推動汽車從單純的交通工具向智能移動空間和網絡節點演進。當前的技術研究正致力于打通通信、感知、決策與控制的全鏈條,并解決安全、標準等關鍵挑戰。只有深刻理解這些超越“速度”的深層趨勢與技術脈絡,才能在即將到來的智能交通革命中搶占先機,避免落后于時代浪潮。